The cross product and dot product are two fundamental operations in vector calculus, used to describe the relationship between vectors in three-dimensional space. These operations are crucial in various fields, including physics, engineering, and computer science. Understanding the differences and applications of the cross product and dot product is essential for working with vectors and tackling complex problems in these disciplines.
One of the primary distinctions between the cross product and dot product lies in their mathematical definitions and the resulting outputs. The dot product, also known as the scalar product, takes two vectors as input and produces a scalar value as output. This scalar value represents the amount of "similarity" between the two vectors, with a higher value indicating that the vectors are more aligned. In contrast, the cross product takes two vectors as input and generates another vector as output, perpendicular to both input vectors. This resulting vector's magnitude and direction provide valuable information about the orientation and relationship between the original vectors.
Key Points
- The cross product generates a vector perpendicular to the input vectors, while the dot product produces a scalar value representing the similarity between vectors.
- The dot product is commutative, meaning the order of the vectors does not affect the result, whereas the cross product is anti-commutative, resulting in a vector with opposite direction if the input vectors are swapped.
- Both operations have unique geometric interpretations and applications in physics, engineering, and computer science.
- Understanding the properties and differences between the cross product and dot product is essential for working with vectors in three-dimensional space.
- Real-world applications of these operations include calculating torque, work done, and normal vectors to planes, as well as determining the angle between vectors and the component of one vector along another.
Mathematical Definitions and Properties

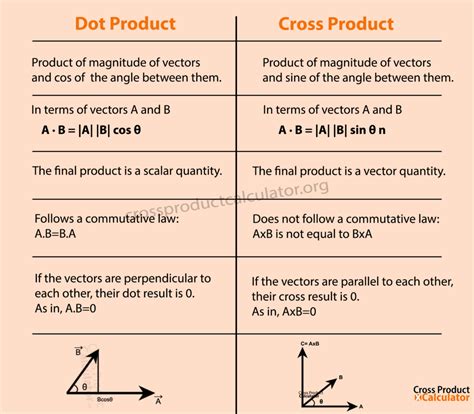
The dot product of two vectors a = (a1, a2, a3) and b = (b1, b2, b3) is defined as the sum of the products of their corresponding components: a · b = a1b1 + a2b2 + a3b3. This operation is commutative, meaning that a · b = b · a. The dot product is also distributive over vector addition, allowing it to be applied to combinations of vectors.
In contrast, the cross product of two vectors a and b is defined as the vector a × b = (a2b3 - a3b2, a3b1 - a1b3, a1b2 - a2b1). This operation is anti-commutative, meaning that a × b = -b × a. The cross product is also distributive over vector addition, but its anti-commutative property makes it useful for describing orientations and relationships between vectors in three-dimensional space.
Geometric Interpretations and Applications
The dot product has a geometric interpretation as the product of the magnitudes of the two vectors and the cosine of the angle between them: a · b = |a| |b| cos(θ). This allows the dot product to be used for calculating the work done by a force on an object, the component of one vector along another, and the angle between two vectors.
The cross product, on the other hand, has a geometric interpretation as the area of the parallelogram formed by the two input vectors. The magnitude of the cross product is equal to the area of this parallelogram: |a × b| = |a| |b| sin(θ). This makes the cross product useful for calculating the torque exerted by a force on an object, the normal vector to a plane, and the orientation of a vector in three-dimensional space.
| Operation | Input | Output | Properties |
|---|---|---|---|
| Dot Product | Two vectors | Scalar value | Commutative, distributive |
| Cross Product | Two vectors | Vector | Anti-commutative, distributive |

Real-World Applications and Examples

The dot product and cross product have numerous applications in various fields. In physics, the dot product is used to calculate the work done by a force on an object, while the cross product is used to calculate the torque exerted by a force. In engineering, the dot product is used to determine the component of one vector along another, and the cross product is used to calculate the normal vector to a plane.
In computer science, the dot product and cross product are used in computer graphics to perform tasks such as transforming objects, projecting images, and determining the orientation of objects in three-dimensional space. Understanding the properties and applications of these operations is essential for working with vectors and tackling complex problems in these disciplines.
What is the primary difference between the cross product and dot product?
+The primary difference between the cross product and dot product lies in their mathematical definitions and the resulting outputs. The dot product produces a scalar value representing the similarity between vectors, while the cross product generates a vector perpendicular to the input vectors.
What are the geometric interpretations of the dot product and cross product?
+The dot product has a geometric interpretation as the product of the magnitudes of the two vectors and the cosine of the angle between them. The cross product has a geometric interpretation as the area of the parallelogram formed by the two input vectors.
What are some real-world applications of the dot product and cross product?
+The dot product and cross product have numerous applications in physics, engineering, and computer science. They are used to calculate work done, torque, normal vectors to planes, and the orientation of objects in three-dimensional space.